Utilities Library¶
These pages refer to various utility functions used across theframework. These functions and types are the subject of a dedicated library and altogether, besides of the third-party dependencies, represent a lowest level of the framework’s API.
- group numerical-utils
Typedefs
-
typedef struct na64dp_KleinScorer na64dp_KleinScorer_t¶
A generalized Kahan-Babuška summation algorithm state instance.
Declares reentrant state object for the Klein’s summation algorithm present in doi:https://doi.org/10.1007%2Fs00607-005-0139-x . An \(i\)-th algorithm have the error \( O(n(log_2 (n) \epsilon)^{i+1}) \).
Usage implies initialization, multiple iterative increment operations and result retreival with corresponding functions.
-
typedef struct na64dp_Covariance na64dp_Covariance_t¶
A running covariance coefficient calculus for two variables.
Explots the running approach to calculate co-moment of the relative distribution.
For summation, the Klein’s scorer is applied as a reentrant state.
-
typedef struct na64dp_CovarianceMatrix na64dp_CovarianceMatrix_t¶
Unweighted covariance matrix implementation.
Number of independent components obeys triangular number series.
Functions
-
int na64sw_projected_lines_intersection(const na64sw_Float_t *k1, const na64sw_Float_t *k2, const na64sw_Float_t *k3, const na64sw_Float_t *r01, const na64sw_Float_t *r02, na64sw_Float_t *x1, na64sw_Float_t *x2)¶
Finds “intersection” points defined by two non-complanar measurements.
A solution for rather common case of what is assumed to be a “track point”, when it should be defined by 1D measurements of two planes. Each “measurement” define a line in space, but two given lines do not intersect (despite are may be very close) — skew lines case.
The proposed solution is, having some “sight” direction, obtain a “seen” intersection. For most of the cases this direction is defined either by closest approach (perpendicular to both lines), or by expected ionizing particle direction.
Found solution \(\vec{x1}, \vec{x2}\) is a line segment directed according to “sight” direction with endpoints lying on first and second line. Applications may use those points independently or take an average to define a spatial point of approximate hit position.
[in] k1 direction vector of 1st measurement
[in] k2 direction vector of 2nd measurement
[in] k3 “sight” direction; if NULL — calculated as closest approach
[in] r01 some point on 1st line
[in] r02 some point on 2nd line
[out] x1 “intersection” point on first line (or equidistant point if x2 is NULL)
[out] x2 “intersection” point on first line (or NULL)
Note
Uses GSL inside (thus, may invoke GSL error handler in some circumustances).
- Returns
0 on success, -1 if no solution exists
-
Double_t langaus(Double_t x, Double_t width, Double_t mp, Double_t area, Double_t sigma, Int_t np = 100, Double_t sc = 5.0)¶
A convoluted Landau and Gauss distribution functions with scaling parameter.
This function is taken from official ROOT tutorial. See, e.g.: https://root.cern/doc/v608/langaus_8C.html
Fit parameters:
In the Landau distribution (represented by the CERNLIB approximation), the maximum is located at x=-0.22278298 (defined in
gLandauFMaxglobal const) with the location parameter=0. This shift is corrected within this function, so that the actual maximum is identical to the MP parameter.- Parameters
x – variable
width – (scale) parameter of Landau density
mp – most Probable (MP, location) parameter of Landau density
area – total area (integral -inf to inf, normalization constant)
sigma – width (sigma) of convoluted Gaussian function
np – number of convolution steps
sc – convolution extends to +-sc Gaussian sigmas
-
std::pair<TF1*, bool> langausfit(TH1F *his, Double_t *fitrange, Double_t *startvalues, Double_t *parlimitslo, Double_t *parlimitshi, const char *fitOpts, Double_t *fitparams, Double_t *fiterrors, Double_t &chiSqr, Int_t &ndf)¶
Will fit provided histogram with
langaus()function with standard ROOT fitting algorithms returning function and model parameters.Note
This function allocates
TF1instance on heap. One has todeleteit afterwards.- Parameters
his – [in] histogram to fit
fitrange – [in] lo and hi boundaries of fit range
startvalues – [in] 4-element, reasonable start values for the fit
parlimitslo – [in] 4-element, lower parameter limits
parlimitshi – [in] 4-element, upper parameter limits
fitOpts – [in] sets fitting options. Default is “LRQ0” (when NULL)
fitparams – [out] 4-element returns the final fit parameters
fiterrors – [out] 4-element returns the final fit errors
chiSqr – [out] returns the chi square
ndf – [out] returns ndf
- Returns
an instance of
TF1representing fit function
-
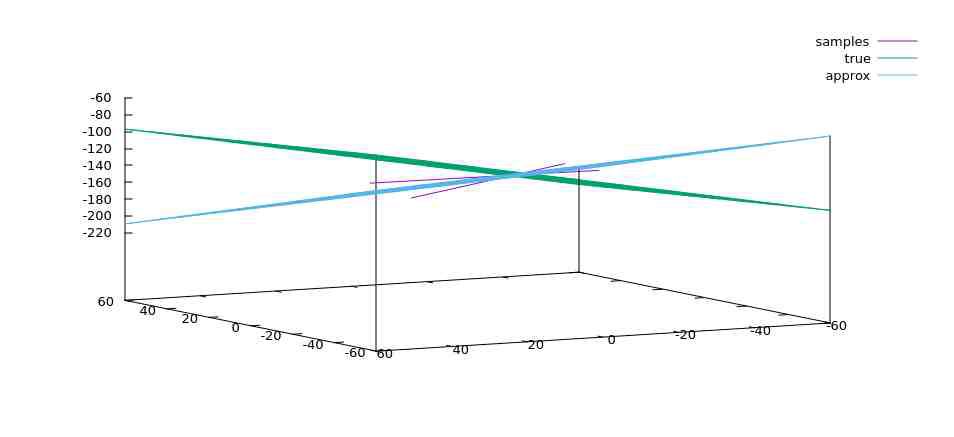
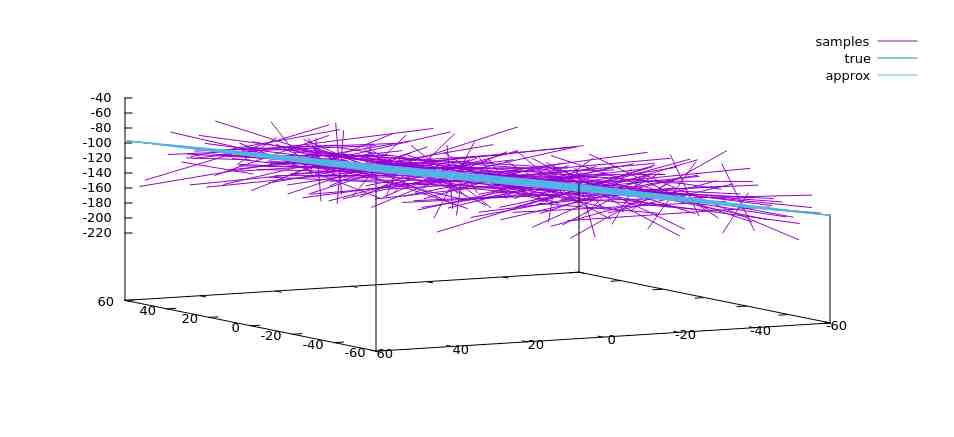
int na64sw_fit_line_segments_w_plane_unweighted(na64sw_Float_t *segments[], size_t nSegments, size_t nDims, na64sw_Float_t *A, na64sw_Float_t *N)¶
Fits the given set of linear segments with plane.
Original method is taken from documentation of Geometric Tools geomToolsSegmentsOrPlane .
-
void na64dp_sum_klein_init(na64dp_KleinScorer_t *S)¶
(Re-)initializes Klein scorer
-
void na64dp_sum_klein_add(na64dp_KleinScorer_t *S, double v)¶
Adds a value to Klein scorer
-
double na64dp_sum_klein_result(const na64dp_KleinScorer_t *S)¶
Returns sum of Klein scorer.
-
void na64dp_cov_init(na64dp_Covariance_t *ptr)¶
(Re-)initializes running Pearson’s covariance calculus
-
void na64dp_cov_account(na64dp_Covariance_t *ptr, double x, double y)¶
Adds variable pair to consideration.
-
double na64dp_covariance_get(const na64dp_Covariance_t *ptr)¶
Get the (population) covariance result from current state.
-
void na64dp_mcov_init(na64dp_CovarianceMatrix_t *ptr, unsigned short d)¶
Initializes covariance matrix for vector of
dcomponents.
-
void na64dp_mcov_account(na64dp_CovarianceMatrix_t *ptr, const double *v)¶
Adds vector to consideration.
-
double na64dp_mcov(na64dp_CovarianceMatrix_t *ptr, int i, int j)¶
Returns covariance of i-th and j-th variables.
-
void na64dp_mcov_free(na64dp_CovarianceMatrix_t *ptr)¶
Frees covariance matrix.
-
template<Arity_t NT, typename SeqT>
class CartesianProduct¶ - #include <cartesian-product.hh>
Helper class representing stateful generator for cartesian product.
Initialized with a sequence of homogeneous STL containers, implements an iterator over cartesian product results (pairs, triplets, quadruplets, etc).
-
template<typename T, Arity_t NT>
struct CartesianProductCollections : protected std::array<std::vector<T>, NT>¶ - #include <cartesian-product.hh>
Product result in array of fixed arity.
-
union Vec3T¶
- #include <linalg.hh>
3-dim spatial vector representation used in the lib
Public Functions
-
inline FloatT operator[](int i) const¶
Component getter.
-
inline FloatT &operator[](int i)¶
Component reference getter.
-
template<typename FloatT2>
inline Vec3T<FloatT> operator*(FloatT2 a) const¶ Vector multiplied by number.
-
template<typename FloatT2>
inline Vec3T<FloatT> &operator*=(FloatT2 a)¶ In-place multiplication by number.
-
template<typename FloatT2>
inline Vec3T<FloatT> operator/(FloatT2 a) const¶ Vector divided by number.
-
template<typename FloatT2>
inline Vec3T<FloatT> operator+(const Vec3T<FloatT2> &b) const¶ Vector sum.
-
template<typename FloatT2>
inline Vec3T<FloatT> &operator+=(const Vec3T<FloatT2> &b)¶ In-place vector sum.
-
template<typename FloatT2>
inline Vec3T<FloatT> operator-(const Vec3T<FloatT2> &b) const¶ Vector sub.
-
template<typename FloatT2>
inline Vec3T<FloatT> &operator-=(const Vec3T<FloatT2> &b)¶ In-place vector sub.
-
template<typename FloatT2>
inline Vec3T<FloatT> cross(const Vec3T<FloatT2> &b) const¶ Vector cross product.
-
inline FloatT norm() const¶
Returns norm of the vector.
-
inline FloatT operator[](int i) const¶
-
union Matrix3T¶
- #include <linalg.hh>
3x3 matrix representation
Public Functions
-
inline const FloatT *operator[](int n) const¶
Returns RO-ptr to the 1st element in Nth row.
-
inline FloatT *operator[](int n)¶
Returns RW-ptr to the 1st element in Nth row.
-
template<typename FloatT2>
inline Vec3T<FloatT> operator*(const Vec3T<FloatT2> &v) const¶ Matrix.Vector product.
-
template<typename FloatT2>
inline Matrix3T<FloatT> operator*(const Matrix3T<FloatT2> &bm) const¶ Matrix.Matrix product.
-
inline FloatT det() const¶
Matrix determinant
Directly computes matrix determinant based on first line.
Warning
Must not be used for general purpose as can be numerically unstable for small values in first line.
-
inline const FloatT *operator[](int n) const¶
-
struct na64dp_KleinScorer¶
- #include <sums.h>
A generalized Kahan-Babuška summation algorithm state instance.
Declares reentrant state object for the Klein’s summation algorithm present in doi:https://doi.org/10.1007%2Fs00607-005-0139-x . An \(i\)-th algorithm have the error \( O(n(log_2 (n) \epsilon)^{i+1}) \).
Usage implies initialization, multiple iterative increment operations and result retreival with corresponding functions.
Subclassed by na64dp::numerical::KleinScorer
-
struct na64dp_Covariance¶
- #include <sums.h>
A running covariance coefficient calculus for two variables.
Explots the running approach to calculate co-moment of the relative distribution.
For summation, the Klein’s scorer is applied as a reentrant state.
Subclassed by na64dp::numerical::CorrelationScorer
Public Members
-
unsigned long n¶
Number of pairs being considered
-
na64dp_KleinScorer_t xMean¶
< Current mean of X samples
-
na64dp_KleinScorer_t yMean¶
< Current mean of Y samples
-
na64dp_KleinScorer_t d2x¶
< Sum of X deviation squares
-
na64dp_KleinScorer_t d2y¶
< Sum of Y deviation squares
-
na64dp_KleinScorer_t rS¶
Sum of relative deviation products
-
unsigned long n¶
-
struct na64dp_CovarianceMatrix¶
- #include <sums.h>
Unweighted covariance matrix implementation.
Number of independent components obeys triangular number series.
Subclassed by na64dp::numerical::CovarianceMatrix
Public Members
-
unsigned short d¶
Number of components in vector
-
unsigned long n¶
Number of considered samples
-
na64dp_KleinScorer_t *means¶
Array of mean scorers
-
na64dp_KleinScorer_t *sqds¶
Array of squared deviation scorers
-
na64dp_KleinScorer_t *covs¶
Sum of relative deviation products (co-moments)
-
unsigned short d¶
-
struct Transformation¶
- #include <transformations.hh>
Combined transformation (rotation, translation, scaling and shear)
This class defines complete set of affine transformation between two \(\mathbb{R}_3\) spaces in terms of:
a translation vector \(\vec{o}\)
a rotation matrix \(R\)
a scale/shear matrix \(W\) composed from local bases vectors \(\vec{u}\), \(\vec{v}\), \(\vec{w}\).
As a result, having a measurement vector \(\vec{m}\) expressed in local (detector’s) frame one can obtain global coordinates as:
\[ \vec{r} = T(\vec{m}) = \vec{o} + R (W \vec{m}) \]This class can be constructed from (and can provide back) quantities that are more convenient to deal with:
rotation angles triplet in certain (user-defined) order
offset vector
local bases vectors of dimensions length (usually corresponding to detector’s sensitive volume).
- Todo:
Support or combination (merging) operations and transformations chaining
Full support for inversion
Method for covariance transformation
Note
Matrix of affine transform (rotation and scaling in local basis) can be used to “rotate” the covariance.
Warning
Dealing with angles, please note that due to mathematical ambiguity returned angular values of \(> \pi/2\) can not always be spatially resolved matching the exact input.
Public Functions
-
Transformation()¶
Creates identity transformation.
-
Transformation(const Vec3 &offset_, const Vec3 &u_, const Vec3 &v_, const Vec3 &w_, Float_t alpha, Float_t beta, Float_t gamma, na64sw_RotationOrder rotationOrder = gStdRotationOrder, bool invertOffset = false)¶
Creates transformation defined by values.
-
Transformation(const Transformation&)¶
Copy ctr.
-
inline bool is_inverse() const¶
Returns
truefor reverse transformation.
-
inline const Vec3 &o() const¶
Returns offset in global (lab) frame.
Offset vector set for the transformation.
Note
Returns same value of same meaning for direct and inverted transform.
-
inline void o(const Vec3 &o_)¶
Sets the offset vector (in lab frame)
Does not invalidate the cache with affine transformations
-
inline const Vec3 &u() const¶
Returns 1st basis vector.
-
inline Vec3 gU() const¶
Returns 1st basis vector rotated to the global frame.
-
inline void u(const Vec3 &u_)¶
Sets 1st basis vector.
Invalidates the cache of affine transformations
-
inline const Vec3 &v() const¶
Returns 2nd basis vector.
-
inline Vec3 gV() const¶
Returns 2nd basis vector rotated to the global frame.
-
inline void v(const Vec3 &v_)¶
Sets 2nd basis vector.
Invalidates the cache of affine transformations
-
inline const Vec3 &w() const¶
Returns 3rd basis vector.
-
inline Vec3 gW() const¶
Returns 3rd basis vector rotated to the global frame.
-
inline void w(const Vec3 &w_)¶
Sets 3rd basis vector.
Invalidates the cache of affine transformations
-
inline na64sw_RotationOrder rotation_order() const¶
Returns rotation order.
-
inline void rotation_order(na64sw_RotationOrder order_)¶
Sets rotation order.
Invalidates cache of affine transformations
-
Float_t angle(int n) const¶
retruns N-th rotation angle
Returns one of three rotation angles (called in ctr as alpha, beta, gamma) that can have different meaning depending on rotation order set.
- Throws
Runtime – error if index is out of range.
-
void angle(int n, Float_t)¶
Sets N-th rotation angle.
Sets one of three rotation angles (called in ctr as alpha, beta, gamma) that can have different meaning depending on rotation order set. Invalidates cache of affine transformations.
- Throws
Runtime – error if index is out of range.
-
const Matrix3 &rotation_matrix() const¶
Returns rotation matrix.
-
const Matrix3 &basis() const¶
Returns shear-and-scale transformation matrix built on local basis.
-
const Matrix3 &affine_matrix() const¶
Returns full affine transform matrix (without global offset)
-
inline void apply(Vec3 &m) const¶
Applies spatial transformation to the vector, modifying it.
-
Transformation inverted() const¶
Returns inverse affine transformation.
- na64dp::util::Vec3T.c
Data acessed by component name.
-
typedef struct na64dp_KleinScorer na64dp_KleinScorer_t¶
- group numerical-utils-online-stats
-
class KleinScorer : protected na64dp_KleinScorer¶
- #include <online.hh>
C++ interface over C implementation of Klein’s scorer.
See also
Public Functions
-
inline KleinScorer()¶
Constructs initialized scorer instance.
-
inline void add(double v)¶
Adds the value to sum.
-
inline KleinScorer &operator+=(double v)¶
Adds the value to sum (operator shortcut)
-
inline double result() const¶
Returns computed sum.
-
inline operator double() const¶
Returns computed sum (operator shortcut)
-
inline void reset()¶
Drops the scorer value to 0.
-
inline KleinScorer()¶
-
class CorrelationScorer : protected na64dp_Covariance¶
- #include <online.hh>
A C++ wrapper around
na64dp_CovariancePublic Functions
-
inline CorrelationScorer()¶
Initializes and constructs covariance scorer instance.
-
inline void account(double x, double y)¶
Accounts pair of values.
-
inline double covariance() const¶
Returns unbiased covariance value.
-
inline double pearson_correlation() const¶
Returns Pearson’s correlation coefficient.
-
inline unsigned long n_accounted() const¶
Returns number of accounted pairs.
-
inline double mean_x() const¶
Returns mean X value.
-
inline double mean_y() const¶
Returns mean Y value.
-
inline double sq_dev_x() const¶
Returns sum of squared deviations of X value.
-
inline double variance_x() const¶
Returns variance of X.
-
inline double sq_dev_y() const¶
Returns sum of squared deviations of Y value.
-
inline double variance_y() const¶
Returns variance of Y.
-
inline CorrelationScorer()¶
-
class CovarianceMatrix : protected na64dp_CovarianceMatrix¶
- #include <online.hh>
Covariance matrix wrapper around
na64dp_CovarianceMatrixC struct.This implementation is a bit more efficient than multiple
CorrelationScorerinstances though it explicitly requires that none of the considered vector components may be NaN.Public Functions
-
inline CovarianceMatrix(unsigned short v)¶
Creates pairwise covariance scorer for vector of
d
-
inline ~CovarianceMatrix()¶
Frees covariance scorer (heap used)
-
inline void account(const double *v)¶
Takes into account given sample vector.
-
inline double mean(int i) const¶
Returns i-th mean value.
-
inline unsigned long n_accounted() const¶
Returns number of accounted vectors.
-
inline unsigned short n_dimensions() const¶
Returns dimensionality.
-
inline double mean(int i)¶
Returns i-th mean value.
-
inline double sq_dev(int i)¶
Returns i-th squared deviation value.
-
inline double variance(int i)¶
Returns variance value of i-th component.
-
inline double covariance(int i, int j)¶
Returns covariance value of i-th and j-th component.
-
inline double pearson_correlation(int i, int j)¶
Returns Pearson’s correlation value of i-th and j-th component.
-
inline CovarianceMatrix(unsigned short v)¶
-
class iMovStats¶
- #include <online.hh>
Utility interface class representing windowed (sliding) statistics.
Subclassed by na64dp::numerical::MovingStats< ScorerT >
-
template<typename ScorerT>
class MovingStats : public na64dp::numerical::iMovStats, public std::deque<double>¶ - #include <online.hh>
Implements moving statistics using strightforward approach
Maintains a deque of N samples, dynamically recalculating mean/stddev values each time new sample is accounted.
Public Functions
-
inline MovingStats(size_t N, double excludeOutliers = 6., double recacheOnOutliers = 6., double recachingFrac = 1.)¶
Constructs empty sliding scorer.
Used to create new instances of the scorer in cases when no initial data is available. Various estimations derived by this instance (like mean and stdev) at first
Nevents will not be properly conditioned because of lack of the data, so wherever is possible an alternative form of constructor has to be used.- Parameters
N – size of sliding window
excludeOutliers – \(k\) in \(k \times \sigma\) to classify outliers
recacheOnOutliers – \(k\) in \(k \times \sigma\) to recache
recachingFrac – fraction of events to force sums recache
-
inline MovingStats(double *initial, size_t N, double excludeOutliers = 6., double recacheOnOutliers = 6., double recachingFrac = 1.)¶
Constructs empty sliding scorer.
Used to create new instances of the scorer in cases when no initial data is available. Various estimations derived by this instance (like mean and stdev) at first
Nevents will not be properly conditioned because of lack of the data, so wherever is possible an alternative form of constructor has to be used.- Parameters
initial – shall contain at least
Nsamples for initial state of accumulatorN – size of sliding window
excludeOutliers – \(k\) in \(k \times \sigma\) to classify outliers
recacheOnOutliers – \(k\) in \(k \times \sigma\) to recache
recachingFrac – fraction of events to force sums recache
-
inline virtual bool is_outlier(double sample, double threshold = 3.) const override¶
Returns true if given sample is beyond $6 \(\sigma\).
-
inline virtual double mean() const override¶
Returns mean value \((1/N) \sum\limits_{i=1}^N x_i\).
-
inline virtual void account(double sample) override¶
Takes into account sample \(x_i\).
-
inline double sigma_sq() const¶
Returns (unbiased, sliding) \( \sigma^2 \).
-
inline virtual std::vector<double> data_copy() const override¶
Copies entries from deque to vector.
-
inline MovingStats(size_t N, double excludeOutliers = 6., double recacheOnOutliers = 6., double recachingFrac = 1.)¶
-
class KleinScorer : protected na64dp_KleinScorer¶